- Description
- Specifications
- Customize
- Downloads
- Ask a Question
Features
Extra-low motor noise offers excellent quietness
Anti-Resonance, provides optimum torque and nulls mid-range
instability
Self-test and Auto-configuration technology, offers optimum
responses with different motors
Microstep resolutions programmable, from full-step to 102,400
steps/rev
Supply voltage up to 220 VAC
Output current programmable, from 0.5A to 8.2A
Pulse input frequency up to 200 KHz
Automatic idle-current reduction
Supports PUL/DIR and CW/CCW modes
The DM2282 is a high voltage, versatility fully digital stepping driver based on a DSP with advanced control algorithm. It brings a unique level of system smoothness, providing optimum torque and nulls mid-range instability. Motor self-test and parameter auto-configuration technology offers optimum responses with different motors and easy-to-use. The driven motors can run with much smaller noise, lower heating, smoother movement than most of the drivers on the markets. Its unique features make the DM2282 an ideal solution for applications that require low-speed smoothness.
Electrical Specifications (Tj =
25oC/77oF)
|
Paramete
|
DM2282
|
|
Min
|
Typical
|
Max
|
Unit
|
|
Output current
|
0.5
|
-
|
8.2 (5.9 RMS)
|
A
|
|
Supply voltage
|
80(115)
|
220(155)
|
220(305)
|
VAC(VDC)
|
|
Logic signal current
|
7
|
10
|
16
|
mA
|
|
Pulse input frequency
|
0
|
-
|
200
|
kHz
|
|
Isolation resistance
|
500
|
|
|
MΩ
|
Connector P1 Configurations
|
Pin Functions
|
Details
|
|
PUL+
|
Pulse signal: In single pulse (pulse/direction) mode, this input
represents pulse signal, each rising or falling edge active (software
configurable); 4-5V when PUL-HIGH, 0-0.5V when PUL-LOW. In double pulse mode
(pulse/pulse) , this input represents clockwise (CW) pulse,active both at high level and low level (software configurable).
For reliable response, pulse width should be longer than 2.5μs. Series
connect resistors for current-limiting when +12V or +24V used. The same as
DIR and ENA signals.
|
|
PUL-
|
|
DIR+
|
DIR signal: In single-pulse mode, this signal has low/high voltage
levels, representing two directions of motor rotation; in double-pulse mode
(software configurable), this signal is counter-clock (CCW) pulse,active both at high level and low level (software configurable).
For reliable motion response, DIR signal should be ahead of PUL signal by 5μs
at least. 4-5V when DIR-HIGH, 0-0.5V when DIR-LOW. Please note that
rotation direction is also related to motor-driver wiring match. Exchanging
the connection of two wires for a coil to the driver will reverse motion
direction.
|
|
DIR-
|
|
ENA+
|
Enable signal: This signal is used for enabling/disabling the drive. In
default, high level (NPN control signal) for enabling the driver and low
level for disabling the driver. Usually left UNCONNECTED (ENABLED).
Please note that PNP and Differential control signals are on the contrary,
namely Low level for enabling. The active level of ENA signal is software
configurable.
|
|
ENA-
|
|
FAULT+
|
Fault Signal: OC output signal, active when one of the following
protection is activated: over-voltage, over current, low voltage, phase error
and over-temperature. This port can sink or source 20mA current at 24V. In
default, the resistance between FAULT+ and FAULT- is high impedance in normal
operation and become low when DM2282 goes into error.
|
|
FAULT-
|
Connector P2 Configurations
|
Pin Function
|
Details
|
|
PE
|
Recommend connect this port to the
ground for better safety.
|
|
AC
|
AC power supply inputs. If AC input,
recommend use isolation transformers with theoretical output voltage of
80~220VAC. DC input range is 115~305VDC
|
|
AC
|
|
A+, A-
|
Motor Phase A
|
|
B+, B-
|
Motor Phase B
|
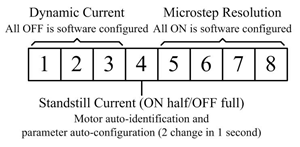
Microstep resolutions and output current
are programmable, the former can be set from full-step to 102,400 steps/rev and
the latter can be set from 0.5A to 8.2A .
However, when it’s not in software
configured mode, this drive uses an 8-bit DIP switch to set microstep
resolution, and motor operating current, as shown below:
Microstep Resolution Selection
When it's not in software configured mode,
microstep resolution is set by SW5, 6, 7, 8 of the DIP switch as shown in the
following table:
|
Microstep
|
Steps/rev.(for 1.8o motor)
|
SW5
|
SW6
|
SW7
|
SW8
|
|
1 to 512
|
Default/Software configured
|
on
|
on
|
on
|
on
|
|
2
|
400
|
off
|
on
|
on
|
on
|
|
4
|
800
|
on
|
off
|
on
|
on
|
|
8
|
1600
|
off
|
off
|
on
|
on
|
|
16
|
3200
|
on
|
on
|
off
|
on
|
|
32
|
6400
|
off
|
on
|
off
|
on
|
|
64
|
12800
|
on
|
off
|
off
|
on
|
|
128
|
25600
|
off
|
off
|
off
|
on
|
|
5
|
1000
|
on
|
on
|
on
|
off
|
|
10
|
2000
|
off
|
on
|
on
|
off
|
|
20
|
4000
|
on
|
off
|
on
|
off
|
|
25
|
5000
|
off
|
off
|
on
|
off
|
|
40
|
8000
|
on
|
on
|
off
|
off
|
|
50
|
10000
|
off
|
on
|
off
|
off
|
|
100
|
20000
|
on
|
off
|
off
|
off
|
|
125
|
25000
|
off
|
off
|
off
|
off
|
Current Settings
When it's not in software configured mode,
the first three bits (SW1, 2, 3) of the DIP switch are used to set the dynamic
current. Select a setting closest to your motor's required current.
|
Peak Current
|
RMS Current
|
SW1
|
SW2
|
SW3
|
|
Default/Software configured (0.5 to 8.2A )
|
OFF
|
OFF
|
OFF
|
|
2.2A
|
1.6A
|
ON
|
OFF
|
OFF
|
|
3.2A
|
2.3A
|
OFF
|
ON
|
OFF
|
|
4.2A
|
3.2A
|
ON
|
ON
|
OFF
|
|
5.2A
|
3.7A
|
OFF
|
OFF
|
ON
|
|
6.3A
|
4.4A
|
ON
|
OFF
|
ON
|
|
7.2A
|
5.2A
|
OFF
|
ON
|
ON
|
|
8.2A
|
5.9A
|
ON
|
ON
|
ON
|
Typical Connections

Mechanical Specifications (unit: mm
[inch])
